

Навчальний роботизований модуль TRIADA-ROBO S10-706
Навчальний роботизований модуль TRIADA-ROBO S10-706 — це компактна промислова навчально-дослідна платформа на базі 6-осьового промислового робота Yaskawa MH-5, оснащеного пневматичним захватом для операцій захоплення, переміщення, сортування та укладання малих деталей.
Модуль призначений для практичного навчання промисловій робототехніці, програмуванню роботів, роботизованому маніпулюванню, роботі з кінцевими виконавчими пристроями, цифровими сигналами та логікою автоматизованих виробничих процесів.

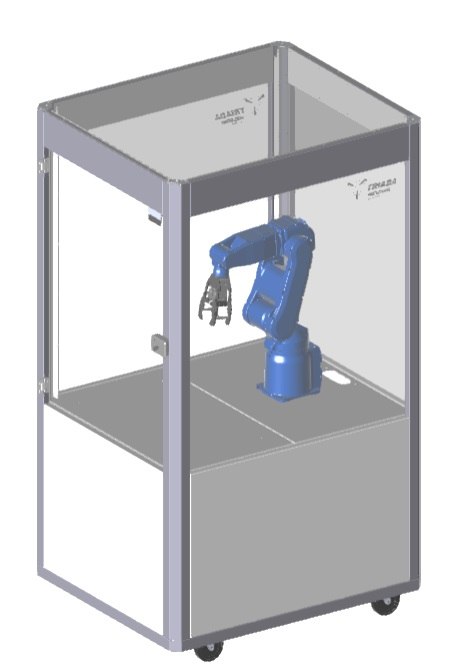
На відміну від спрощених навчальних макетів, TRIADA-ROBO S10-706 дозволяє працювати з реальною промисловою робототехнічною архітектурою: 6-осьовим маніпулятором, контролером Yaskawa Motoman DX200, пультом навчання, мовою програмування INFORM, пневматичним захватом, вхідними та вихідними сигналами, траєкторіями руху, системами координат і логікою автоматизованого циклу.
Для Центру HI-RISE цей модуль є важливим елементом навчальної інфраструктури, оскільки дозволяє формувати базові та поглиблені компетентності з промислової робототехніки у компактному, безпечному та зручному для освітнього процесу форматі.
Основні технічні характеристики
| Параметр | Значення |
| Назва модуля | TRIADA-ROBO S10-706 |
| Тип обладнання | навчальний роботизований модуль |
| Робот | Yaskawa MH-5 |
| Тип робота | компактний 6-осьовий промисловий робот |
| Максимальне корисне навантаження | 5 кг |
| Максимальний радіус дії | 706 мм |
| Кількість осей | 6 |
| Повторюваність | ±0,02 мм |
| Середня потужність | 1,0 кВА |
| Контролер | Yaskawa Motoman DX200 |
| Мова програмування | INFORM |
| Спосіб програмування | Teach Pendant Programming, програмування командами INFORM |
| Монтаж | підлоговий; для окремих виконань можливі інші варіанти монтажу |
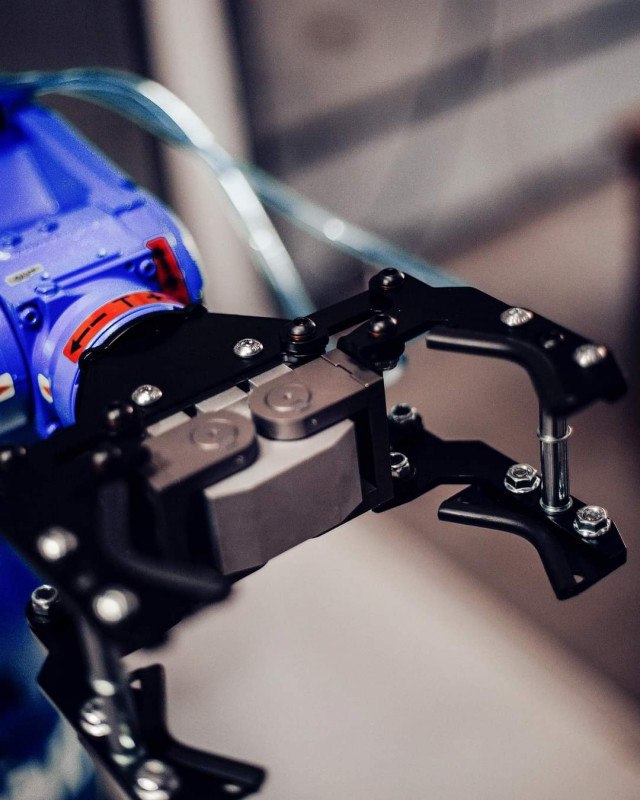
| Кінцевий виконавчий пристрій | пневматичний захват |
| Основні операції | захоплення, переміщення, сортування, укладання малих деталей |
| Основне призначення | навчання робототехніці, програмуванню, маніпулюванню, автоматизації та роботизованим виробничим процесам |
Призначення модуля
TRIADA-ROBO S10-706 призначений для практичного освоєння принципів промислової робототехніки та автоматизованого маніпулювання. Модуль дозволяє здобувачам освіти працювати з реальним промисловим роботом у форматі навчальної комірки, відпрацьовувати типові роботизовані операції та розуміти структуру сучасної автоматизованої системи.
Робот Yaskawa MH-5 у складі модуля може виконувати операції захоплення, переміщення, укладання, сортування та подачі малих деталей. Пневматичний захват дає змогу моделювати типові виробничі сценарії: взяти деталь у вихідній позиції, перемістити її за заданою траєкторією, укласти у визначену комірку або передати на наступну умовну операцію.
Це робить модуль зручним для навчання основам гнучкої автоматизації, логіки роботизованого циклу, взаємодії робота з периферією та організації малих виробничих комірок.
Діапазони руху та швидкості осей
| Вісь | Діапазон руху | Максимальна швидкість |
| S | ±170° | 376 °/с |
| L | +150° / –65° | 350 °/с |
| U | +155° / –136° | 400 °/с |
| R | ±190° | 450 °/с |
| B | ±135° | 450 °/с |
| T | ±360° | 720 °/с |
Контролер Yaskawa Motoman DX200 та мова програмування INFORM
Керування роботом здійснюється за допомогою промислового контролера Yaskawa DX200.
DX200 – це компактна багатовісна та багатозадачна контролерна платформа для роботів і периферійного руху, з можливістю координації до 4 роботів і зовнішніх осей до загальної кількості 48 осей. Контролер має стандартні комунікаційні інтерфейси, зокрема Ethernet, цифрові входи/виходи та TCP/IP web server function для моніторингу або обслуговування.
Контролер відповідає за виконання програм, координацію рухів осей робота, оброблення цифрових входів і виходів, взаємодію з пневматичним захватом, діагностику станів системи та реалізацію логіки автоматизованого процесу.
Важливою особливістю модуля є можливість вивчення логіки програмування роботів Yaskawa мовою INFORM. Це дозволяє студентам зрозуміти структуру роботизованої програми, принципи побудови команд, роботу зі змінними, умовними переходами, сигналами, циклами та технологічною логікою.
Що дає вивчення INFORM
Використання мови INFORM у освітньому процесі дозволяє перейти від простого «навчання точок» до більш системного розуміння програмування промислового робота.
Студенти можуть опановувати:
- структуру роботизованої програми;
- команди переміщення;
- роботу з позиціями;
- логіку захоплення і відпускання деталі;
- цифрові входи та виходи;
- умовні оператори;
- циклічні операції;
- переходи між фрагментами програми;
- команди очікування сигналів;
- взаємодію робота з пневматичним обладнанням;
- діагностику і налагодження програм.
Навчання не обмежується механічним запам’ятовуванням точок через пульт. Здобувачі освіти вивчають програмну логіку промислового робота, що є важливим для майбутньої роботи з реальними автоматизованими системами.
Можливості застосування
Операції захоплення, переміщення та укладання
Модуль дозволяє відпрацьовувати базові операції роботизованого маніпулювання. Робот за допомогою пневматичного захвата може захоплювати деталь, переміщувати її у просторі та укладати у визначене положення.
Такі операції є основою багатьох промислових процесів: складання, пакування, сортування, подачі компонентів, обслуговування обладнання та внутрішньої виробничої логістики.
Сортування малих деталей
TRIADA-ROBO S10-706 може використовуватися для моделювання сортування деталей за заданою послідовністю, позицією або умовною ознакою. У навчальному процесі це дозволяє пояснювати принципи автоматизованого циклу, повторюваності, умовного виконання команд і взаємодії робота з периферійними сигналами.
Моделювання автоматизованого складання
Модуль може демонструвати прості складальні операції: подачу елементів, переміщення деталей між позиціями, встановлення компонента у визначене положення або імітацію багатоетапного виробничого процесу.
Це дає змогу студентам зрозуміти роль промислового робота не лише як маніпулятора, а як елемента цілісної автоматизованої системи.
Вивчення роботи з пневматичним захватом
Пневматичний захват дозволяє досліджувати взаємодію робота з кінцевим виконавчим пристроєм. Студенти можуть вивчати принципи керування захватом, логіку відкриття та закриття, синхронізацію руху робота з роботою пневматики, а також оброблення сигналів підтвердження.
Демонстрація гнучкої автоматизації
Один і той самий модуль може бути швидко переналаштований під різні навчальні сценарії: переміщення, сортування, укладання, роботу з різними точками, зміну траєкторії, роботу з умовними сигналами та побудову циклічних програм. Це дозволяє демонструвати принципи гнучкого виробництва в компактному лабораторному форматі.
Освітня цінність
TRIADA-ROBO S10-706 є ефективною платформою для підготовки студентів у сфері промислової робототехніки, автоматизації, мехатроніки, програмування роботів і цифрового виробництва.
Його особлива перевага полягає в тому, що студенти працюють не лише з механічним переміщенням робота, а з повною логікою промислової роботизованої системи: контролером, мовою програмування INFORM, пультом навчання, захватом, цифровими сигналами, траєкторіями, системами координат і безпекою.
На базі модуля можна проводити лабораторні й практичні заняття з таких тем:
| Напрям навчання | Зміст |
| Основи промислової робототехніки | осі робота, робочий простір, системи координат, точка TCP |
| Програмування через Teach Pendant | створення точок, запис траєкторій, запуск і редагування програм |
| Програмування мовою INFORM | команди руху, логіка програм, сигнали, умови, цикли |
| Робота з пневматичним захватом | керування захопленням і відпусканням деталей |
| Цифрові входи та виходи | взаємодія робота з периферійними пристроями |
| Автоматизовані цикли | побудова повторюваних операцій і умовних сценаріїв |
| Траєкторне програмування | оптимізація рухів, скорочення холостих переміщень |
| Безпека роботизованої комірки | правила запуску, зупинки, аварійні режими, аналіз ризиків |
| Гнучке виробництво | переналаштування робота під різні задачі |
На базі модуля можуть бути реалізовані такі практичні завдання:
- Ознайомлення з промисловим роботом Yaskawa MH-5
- Вивчення конструкції робота, осей, робочого простору, контролера DX200 та пульта навчання.
- Створення першої програми через Teach Pendant
- Запис точок, формування базової траєкторії, запуск програми в безпечному режимі.
- Основи програмування мовою INFORM
- Аналіз структури програми, команд руху, сигналів, переходів і логіки виконання.
- Налаштування TCP для пневматичного захвата
- Визначення інструментальної точки та перевірка точності позиціонування.
- Операція захоплення, переміщення та укладання деталі
- Побудова повного циклу: підхід, захоплення, переміщення, укладання, повернення.
- Керування пневматичним захватом через цифрові виходи
- Вивчення логіки сигналів, затримок, підтвердження стану та синхронізації з рухом.
- Сортування деталей за заданою послідовністю
Створення програми для переміщення кількох об’єктів у різні позиції. - Оптимізація траєкторії та часу циклу
- Порівняння різних маршрутів руху, зменшення холостих переміщень і підвищення ефективності.
- Побудова циклічної програми
- Використання повторюваних дій, умовних переходів і логіки автоматизованої операції.
- Аналіз безпеки роботизованої комірки
- Вивчення безпечних зон, режимів роботи, аварійної зупинки та процедур запуску.
Науково-дослідний потенціал
TRIADA-ROBO S10-706 може використовуватися як компактна дослідницька платформа для вивчення роботизованого маніпулювання, траєкторного керування, автоматизованого складання, роботи з кінцевими виконавчими пристроями та гнучких виробничих систем.
Можливі напрями досліджень:
- оптимізація траєкторій промислового робота;
- аналіз часу циклу для операцій захоплення і переміщення;
- дослідження точності позиціонування;
- порівняння різних стратегій руху;
- розроблення алгоритмів сортування малих деталей;
- дослідження роботи пневматичного захвата;
- взаємодія робота з цифровими сигналами;
- моделювання малих роботизованих комірок;
- інтеграція з сенсорами;
- інтеграція з системами комп’ютерного зору;
- створення навчальних цифрових двійників;
- дослідження гнучких виробничих процесів.
Контролер DX200 і мова INFORM дозволяють будувати не лише прості демонстраційні рухи, а повноцінні логічні сценарії автоматизації. Це відкриває можливості для студентських дослідницьких проєктів, міждисциплінарних лабораторних робіт і прикладних демонстрацій для промислових партнерів.
Застосування для промисловості
Для промислових партнерів модуль TRIADA-ROBO S10-706 може використовуватися як демонстраційна платформа для пояснення базових принципів роботизації та підготовки персоналу до роботи з промисловими роботами Yaskawa.
Модуль дозволяє демонструвати:
- як робот виконує повторювані операції з високою точністю;
- як організовується робота з пневматичним захватом;
- як програмуються точки, траєкторії та цикли;
- як використовується мова INFORM для побудови логіки програми;
- як робот взаємодіє з цифровими сигналами;
- як оцінюється час циклу;
- як організовується безпечна роботизована комірка;
- які компетентності потрібні оператору, технологу або інженеру з роботизації.
Такий модуль особливо корисний для підприємств, які планують впровадження роботів у процеси переміщення, сортування, укладання, складання, подачі компонентів або обслуговування обладнання. Він дозволяє в компактному форматі показати логіку роботизованої операції та підготувати персонал до роботи з реальними промисловими системами.
Значення для Центру HI-RISE
Навчальний роботизований модуль TRIADA-ROBO S10-706 на базі Yaskawa MH-5 з контролером DX200 доповнює інфраструктуру Центру HI-RISE у напрямі загальної промислової робототехніки, автоматизованого маніпулювання та гнучкого виробництва.
Його наявність дозволяє Центру проводити навчання не лише на рівні керування роботом через пульт, а й на рівні розуміння програмної логіки промислового робота через мову INFORM. Це суттєво підвищує якість підготовки, оскільки студенти вивчають як фізичне переміщення робота, так і програмну структуру автоматизованого процесу.TRIADA-ROBO S10-706 — це компактна промислова навчально-дослідна платформа для формування практичних компетентностей у сфері робототехніки, програмування, автоматизації та цифрового виробництва.
