

Educational Robotics Module TRIADA-ROBO S10-706
TRIADA-ROBO S10-706 Educational Robotic Module is a compact industrial training and research platform based on the 6-axis industrial robot Yaskawa MH-5, equipped with a pneumatic gripper for pick-and-place, handling, sorting, and stacking operations of small parts.
The module is designed for practical training in industrial robotics, robot programming, robotic manipulation, working with end-effectors, digital signals, and the logic of automated production processes.

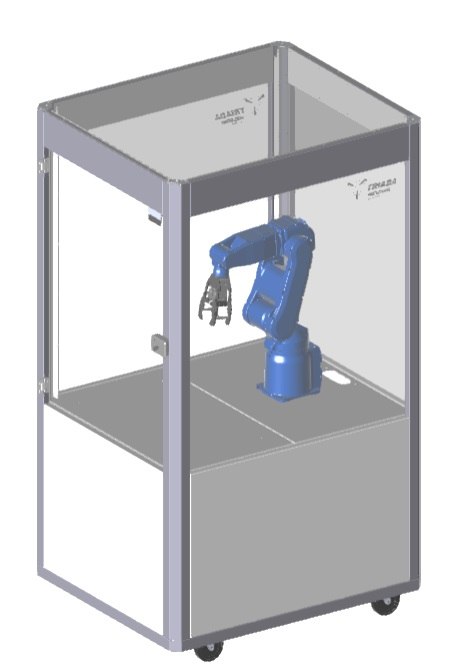
Unlike simplified training mock-ups, the TRIADA-ROBO S10-706 allows working with real industrial robotic architecture: a 6-axis manipulator, Yaskawa Motoman DX200 controller, teach pendant, INFORM programming language, pneumatic gripper, input/output signals, motion trajectories, coordinate systems, and automated cycle logic.
For the HI-RISE Center, this module is an important element of the educational infrastructure, as it enables the formation of basic and advanced competencies in industrial robotics in a compact, safe, and convenient format for the educational process.
Main Technical Specifications
| Parameter | Value |
| Module Name | TRIADA-ROBO S10-706 |
| Equipment Type | educational robotic module |
| Robot | Yaskawa MH-5 |
| Robot Type | compact 6-axis industrial robot |
| Maximum Payload | 5 kg |
| Maximum Reach | 706 mm |
| Number of Axes | 6 |
| Repeatability | ±0.02 mm |
| Average Power | 1.0 kVA |
| Controller | Yaskawa Motoman DX200 |
| Programming Language | INFORM |
| Programming Method | Teach Pendant Programming, INFORM command programming |
| Mounting | floor-mounted; other mounting options possible for specific versions |
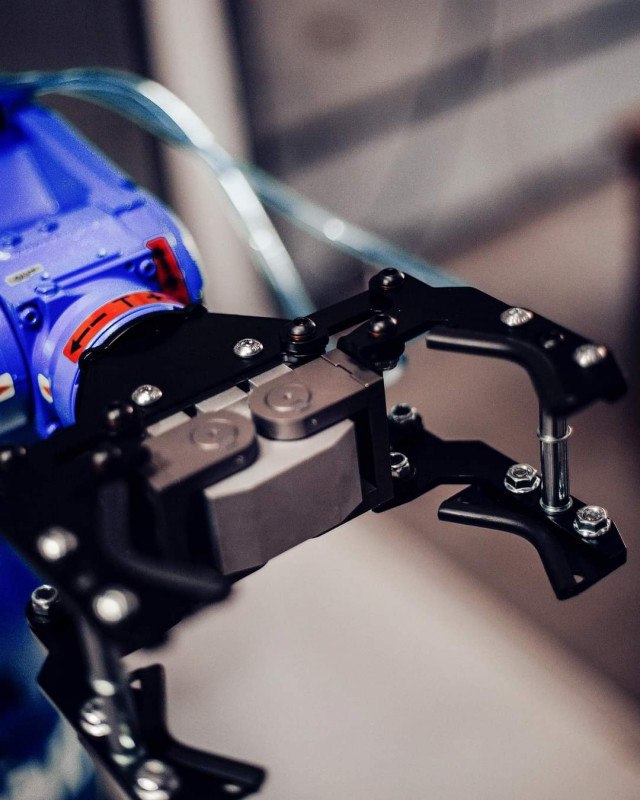
| End Effector | pneumatic gripper |
| Main Operations | pick-and-place, handling, sorting, stacking of small parts |
| Main Purpose | training in robotics, programming, manipulation, automation, and robotic production processes |
Module Purpose
The TRIADA-ROBO S10-706 is designed for practical mastery of industrial robotics and automated manipulation principles. The module allows students to work with a real industrial robot in the format of a training cell, practice typical robotic operations, and understand the structure of a modern automated system.
The Yaskawa MH-5 robot within the module can perform pick-and-place, handling, stacking, sorting, and feeding operations of small parts. The pneumatic gripper enables modeling of typical production scenarios: picking a part from the starting position, moving it along a given trajectory, placing it in a designated cell, or transferring it to the next conditional operation.
This makes the module convenient for learning the basics of flexible automation, robotic cycle logic, robot interaction with peripherals, and the organization of small production cells.
Axis Motion Ranges and Speeds
| Axis | Motion Range | Maximum Speed |
| S | ±170° | 376 °/s |
| L | +150° / –65° | 350 °/s |
| U | +155° / –136° | 400 °/s |
| R | ±190° | 450 °/s |
| B | ±135° | 450 °/s |
| T | ±360° | 720 °/s |
Yaskawa Motoman DX200 Controller and INFORM Programming Language
The robot is controlled using the industrial Yaskawa DX200 controller.
The DX200 is a compact multi-axis and multi-tasking controller platform for robots and peripheral motion, with the ability to coordinate up to 4 robots and external axes for a total of 48 axes. The controller features standard communication interfaces, including Ethernet, digital I/O, and TCP/IP web server function for monitoring or maintenance.
The controller is responsible for program execution, coordination of robot axis movements, processing of digital inputs and outputs, interaction with the pneumatic gripper, system status diagnostics, and implementation of automated process logic.
An important feature of the module is the ability to study the logic of programming Yaskawa robots using the INFORM language. This allows students to understand the structure of a robotic program, the principles of building commands, working with variables, conditional jumps, signals, loops, and technological logic.
What studying INFORM provides
Using the INFORM language in the educational process allows moving from simple “point teaching” to a more systematic understanding of industrial robot programming.
Students can master:
- the structure of a robotic program;
- movement commands;
- working with positions;
- logic of gripping and releasing a part;
- digital inputs and outputs;
- conditional operators;
- cyclic operations;
- transitions between program sections;
- commands for waiting for signals;
- robot interaction with pneumatic equipment;
- program diagnostics and debugging.
Training is not limited to mechanically memorizing points via the pendant. Students study the software logic of an industrial robot, which is essential for future work with real automated systems.
Application Capabilities
Pick-and-place, handling, and stacking operations
The module allows practicing basic robotic manipulation operations. Using the pneumatic gripper, the robot can pick up a part, move it in space, and place it in a designated position.
Such operations form the basis of many industrial processes: assembly, packaging, sorting, component feeding, equipment servicing, and internal production logistics.
Sorting of small parts
The TRIADA-ROBO S10-706 can be used to model part sorting by a given sequence, position, or conditional attribute. In the educational process, this helps explain the principles of automated cycles, repeatability, conditional command execution, and robot interaction with peripheral signals.
Modeling of automated assembly
The module can demonstrate simple assembly operations: feeding elements, moving parts between positions, installing a component in a designated place, or simulating a multi-stage production process.
This allows students to understand the role of an industrial robot not only as a manipulator, but as an element of an integrated automated system.
Studying work with the pneumatic gripper
The pneumatic gripper allows exploration of robot interaction with the end effector. Students can study gripper control principles, opening and closing logic, synchronization of robot motion with pneumatic operation, and processing of confirmation signals.
Demonstration of flexible automation
The same module can be quickly reconfigured for various training scenarios: handling, sorting, stacking, working with different points, changing trajectories, working with conditional signals, and building cyclic programs. This allows demonstrating the principles of flexible manufacturing in a compact laboratory format.
Educational Value
The TRIADA-ROBO S10-706 is an effective platform for training students in industrial robotics, automation, mechatronics, robot programming, and digital manufacturing.
Its particular advantage is that students work not only with the mechanical movement of the robot, but with the full logic of an industrial robotic system: the controller, INFORM programming language, teach pendant, gripper, digital signals, trajectories, coordinate systems, and safety.
Based on the module, laboratory and practical classes can be conducted on the following topics:
| Learning Direction | Content |
| Basics of industrial robotics | robot axes, workspace, coordinate systems, TCP point |
| Programming via Teach Pendant | creating points, recording trajectories, launching and editing programs |
| Programming in INFORM language | movement commands, program logic, signals, conditions, loops |
| Working with pneumatic gripper | control of gripping and releasing parts |
| Digital inputs and outputs | robot interaction with peripheral devices |
| Automated cycles | building repeatable operations and conditional scenarios |
| Trajectory programming | motion optimization, reduction of idle movements |
| Safety of robotic cell | startup and shutdown rules, emergency modes, risk analysis |
| Flexible manufacturing | reconfiguring the robot for different tasks |
The following practical tasks can be implemented based on the module:
- Familiarization with the Yaskawa MH-5 industrial robot
- Study of the robot design, axes, workspace, DX200 controller, and teach pendant.
- Creating the first program via Teach Pendant
- Recording points, forming a basic trajectory, running the program in safe mode.
- Basics of programming in INFORM language
- Analysis of program structure, movement commands, signals, transitions, and execution logic.
- Setting up TCP for the pneumatic gripper
- Determining the tool center point and checking positioning accuracy.
- Pick, move, and place operation
- Building a full cycle: approach, grip, move, place, return.
- Controlling the pneumatic gripper via digital outputs
- Studying signal logic, delays, status confirmation, and synchronization with motion.
- Sorting parts by a given sequence
Creating a program to move multiple objects to different positions. - Trajectory and cycle time optimization
- Comparing different motion routes, reducing idle movements, and increasing efficiency.
- Building a cyclic program
- Using repeatable actions, conditional transitions, and automated operation logic.
- Analysis of robotic cell safety
- Studying safe zones, operating modes, emergency stop, and startup procedures.
Research Potential
The TRIADA-ROBO S10-706 can be used as a compact research platform for studying robotic manipulation, trajectory control, automated assembly, work with end-effectors, and flexible production systems.
Possible research directions:
- optimization of industrial robot trajectories;
- cycle time analysis for pick-and-place operations;
- study of positioning accuracy;
- comparison of different motion strategies;
- development of small part sorting algorithms;
- research on pneumatic gripper operation;
- robot interaction with digital signals;
- modeling of small robotic cells;
- integration with sensors;
- integration with computer vision systems;
- creation of educational digital twins;
- research on flexible production processes.
The DX200 controller and INFORM language allow building not only simple demonstration movements but full logical automation scenarios. This opens opportunities for student research projects, interdisciplinary laboratory work, and practical demonstrations for industrial partners.
Application for Industry
For industrial partners, the TRIADA-ROBO S10-706 module can be used as a demonstration platform to explain the basic principles of robotization and to train personnel for working with Yaskawa industrial robots.
The module allows demonstrating:
- how the robot performs repetitive operations with high precision;
- how work with a pneumatic gripper is organized;
- how points, trajectories, and cycles are programmed;
- how the INFORM language is used to build program logic;
- how the robot interacts with digital signals;
- how cycle time is evaluated;
- how a safe robotic cell is organized;
- what competencies are required for an operator, technologist, or robotics engineer.
Such a module is particularly useful for enterprises planning to implement robots in handling, sorting, stacking, assembly, component feeding, or equipment servicing processes. It allows demonstrating the logic of robotic operations in a compact format and preparing personnel for real industrial systems.
Significance for the HI-RISE Center
The TRIADA-ROBO S10-706 educational robotic module based on the Yaskawa MH-5 with DX200 controller complements the infrastructure of the HI-RISE Center in the field of general industrial robotics, automated manipulation, and flexible manufacturing.
Its presence allows the Center to conduct training not only at the level of robot control via the pendant, but also at the level of understanding the software logic of an industrial robot through the INFORM language. This significantly improves the quality of training, as students study both the physical movement of the robot and the software structure of the automated process.TRIADA-ROBO S10-706 is a compact industrial training and research platform for developing practical competencies in robotics, programming, automation, and digital manufacturing.
