

Технологічні
платформи
Роботизовані системи, цифрове моделювання та інженерна інтеграція для реалізації сучасних виробничих процесів.
Платформи HI-RISE поєднують промислову робототехніку, коботи, змінну оснастку та цифрові інструменти. Кожна платформа розглядається не як окреме обладнання, а як елемент інтегрованої системи для складних та гнучких маніпуляційних задач.
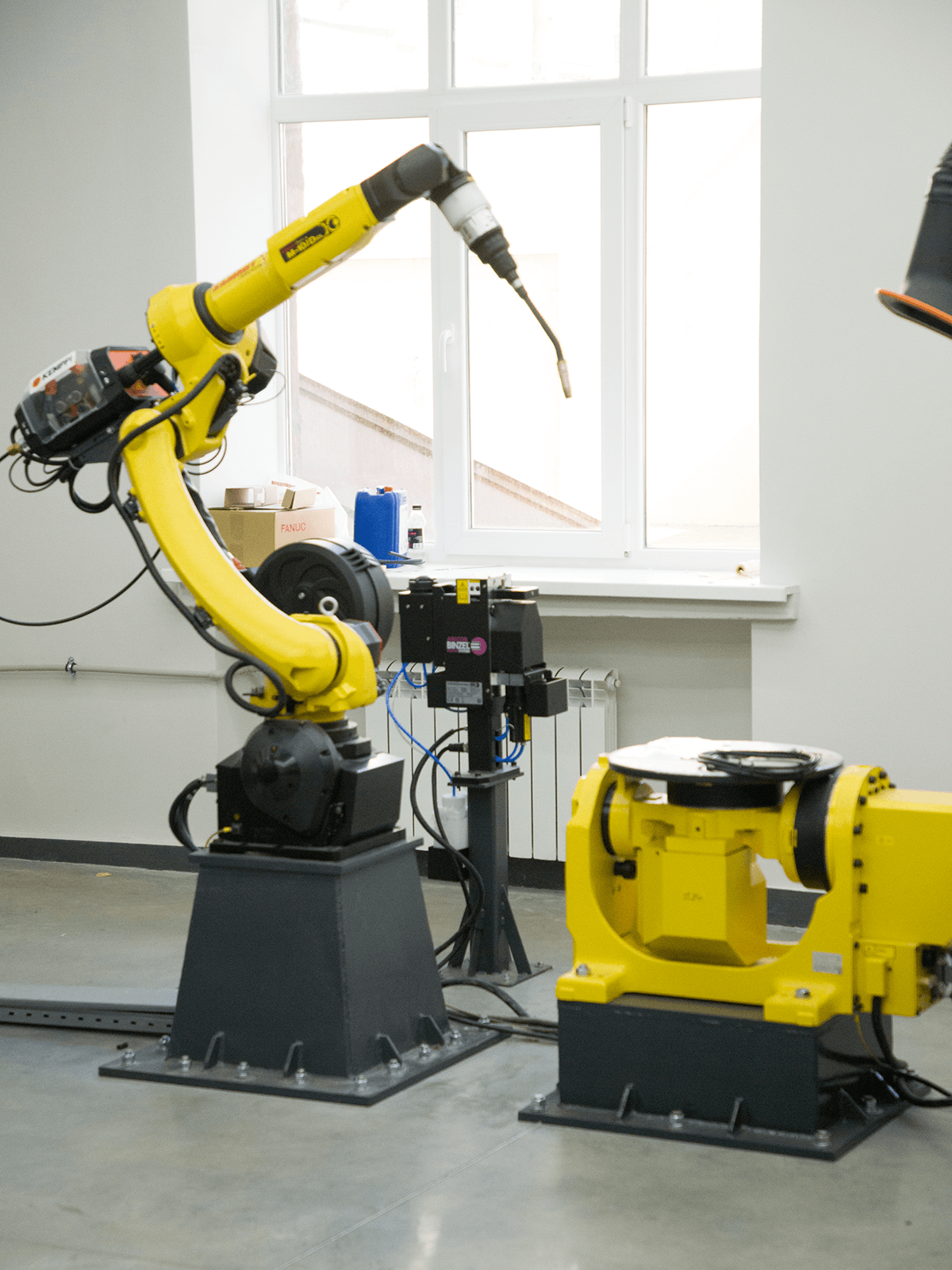
Роботизований зварювальний комплекс
Ця платформа призначена для виконання складних технологічних операцій, що потребують високої точності позиціонування, синхронізованого руху та стабільності процесу. Вона поєднує промисловий робот-маніпулятор із додатковими осями позиціонування та технологічною оснасткою.
Завдяки координації кількох осей система дозволяє реалізувати складні траєкторії руху інструменту, підтримувати оптимальну орієнтацію робочого органу та забезпечувати стабільність технологічного процесу.
Типові можливості платформи
Коботи та системи захватів
Колаборативні роботи (коботи) використовуються для реалізації гнучких виробничих операцій, де важливими є адаптивність, швидка переналагода та безпечна взаємодія з оператором.
На відміну від класичних промислових роботів, коботи дозволяють швидко змінювати робочі сценарії та конфігурацію оснастки. Завдяки використанню змінних захватів одна платформа може виконувати широкий спектр маніпуляційних задач.
Типові операції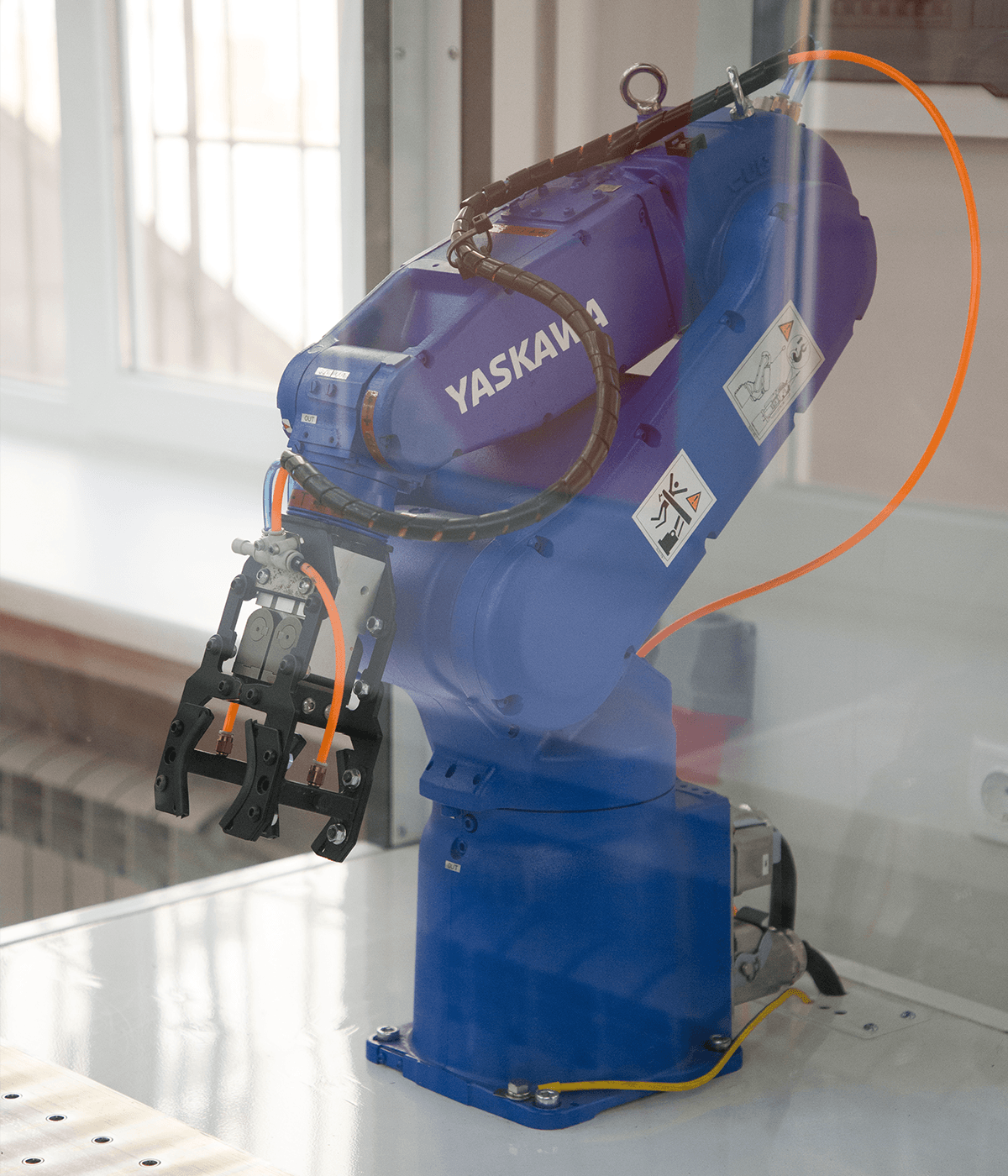
Промисловий робот малого класу
Ця платформа використовується для виконання точних маніпуляційних операцій, навчальних сценаріїв та тестування роботизованих алгоритмів. Компактний промисловий робот дозволяє відпрацьовувати інженерні задачі, пов’язані з позиціонуванням, програмуванням траєкторій і оптимізацією циклів.
Завдяки своїм характеристикам система є зручною як для навчальних цілей, так і для демонстрації принципів роботи роботизованих осередків.
Можливості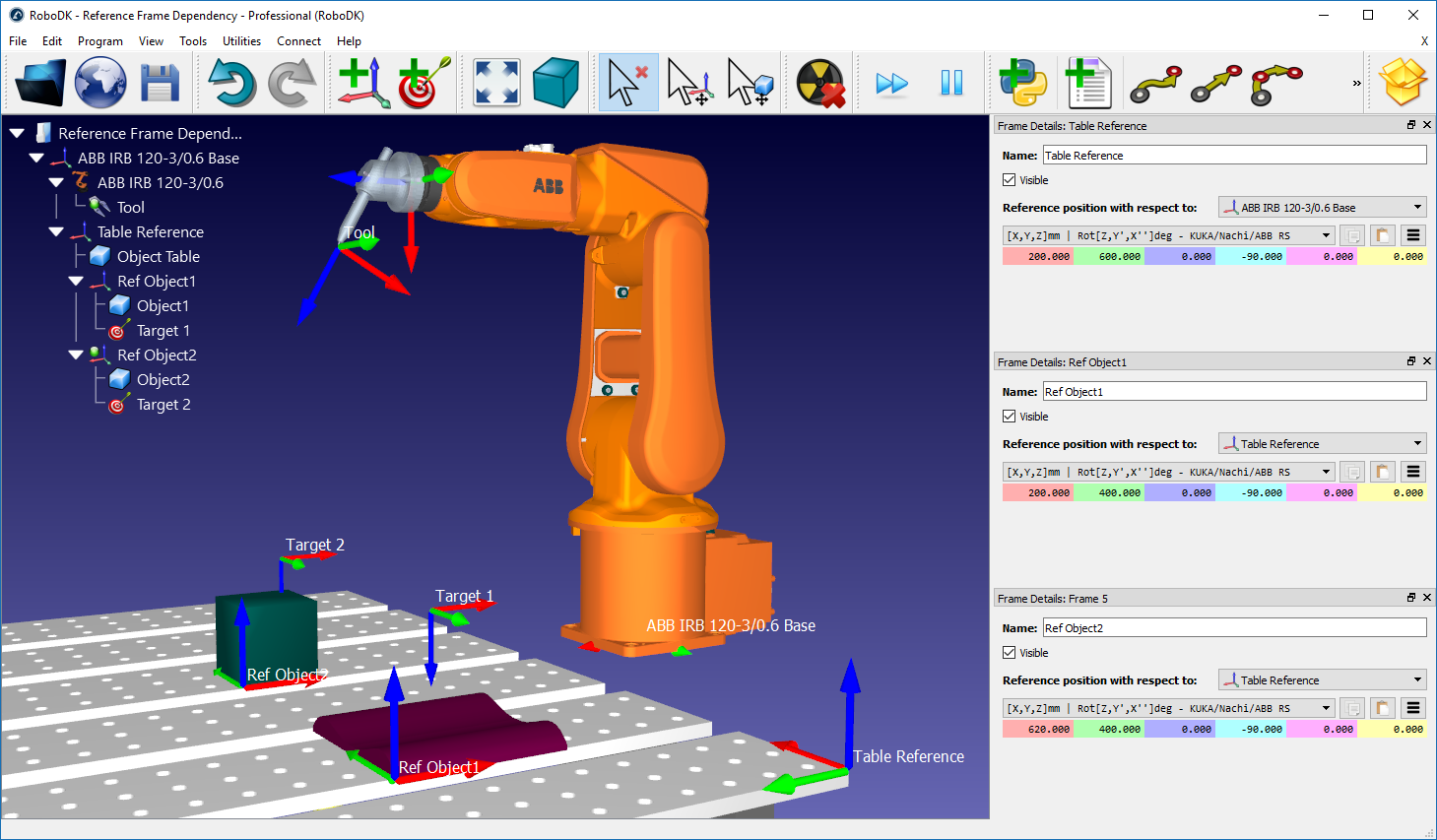
robodk.com
fanuc.eu
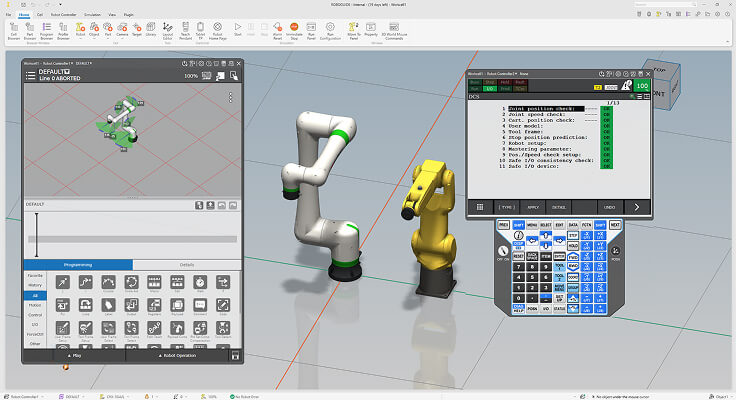
Digital Twin та офлайн-програмування
Цифрові інструменти моделювання дозволяють створювати віртуальні моделі роботизованих систем і відпрацьовувати виробничі сценарії до їх запуску на фізичному обладнанні.
Такий підхід суттєво знижує ризики інтеграції та прискорює запуск роботизованих систем у реальному виробництві.
Можливості офлайн-програмування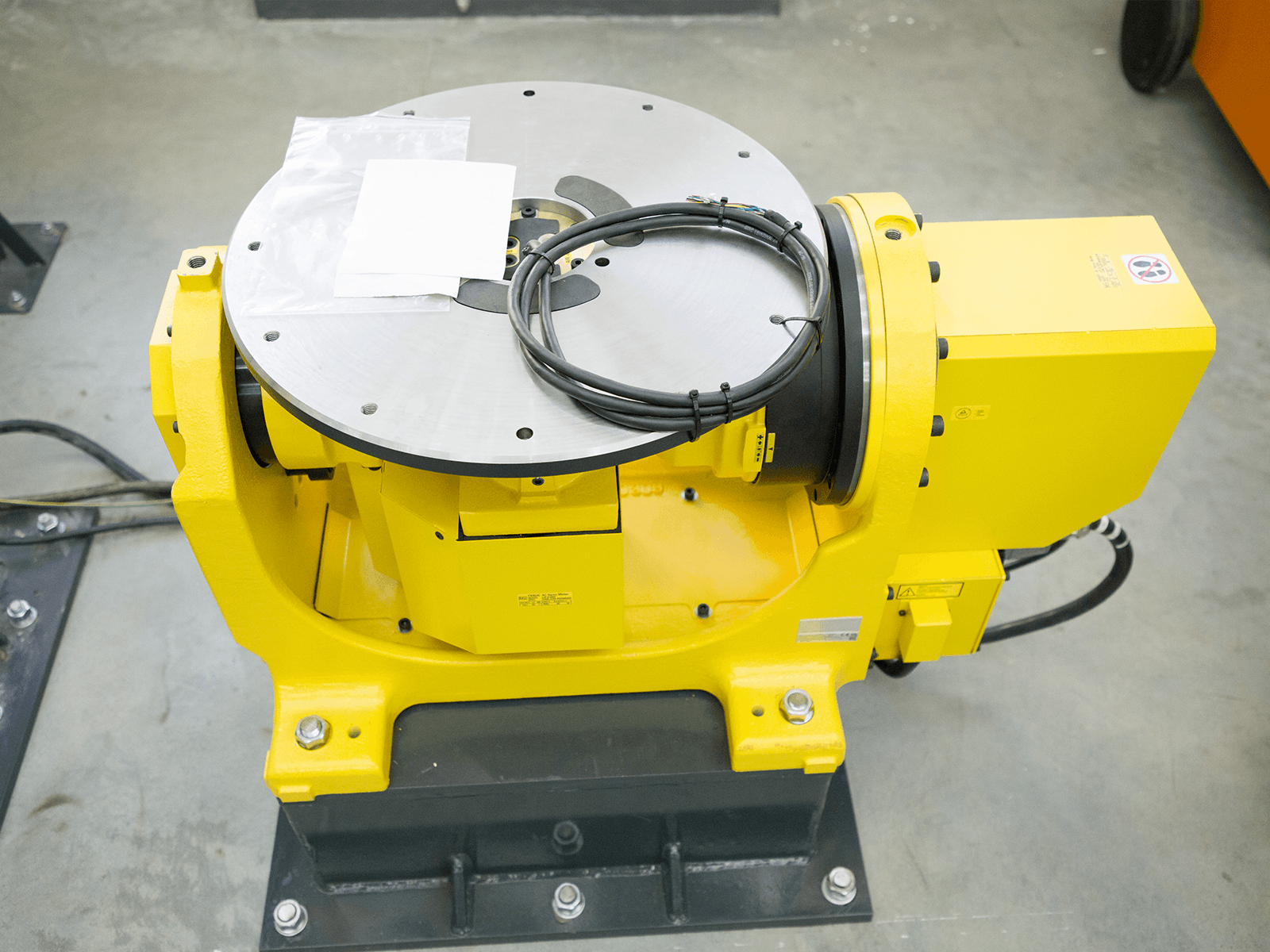
Оснастка та інтеграція систем
Ефективність роботизованої системи визначається не лише характеристиками робота, а й правильною інтеграцією периферійного обладнання. У HI-RISE особлива увага приділяється розробці та використанню змінної оснастки, систем захватів і допоміжних механізмів.
Це дозволяє адаптувати роботизовані системи під різні виробничі задачі та швидко змінювати конфігурацію робочих осередків. Інтеграційний підхід забезпечує створення повноцінних роботизованих робочих осередків, у яких усі елементи працюють як єдина система.
Основні компоненти інтеграціїІнтегрована роботизована екосистема
Окремі платформи HI-RISE можуть використовуватися як самостійні системи або поєднуватися в єдину роботизовану інфраструктуру. Такий підхід дозволяє центру працювати з широким спектром інженерних і виробничих задач.
Коботи виконують маніпуляційні операції
Промисловий робот реалізує технологічний процес
Digital Twin використовується для верифікації сценарію
Змінна оснастка дозволяє адаптувати систему до нової задачі
Технології
як основа
інженерних
рішень.
Технологічні платформи HI-RISE створюють основу для розроблення роботизованих виробничих систем, навчання інженерів і реалізації спільних інноваційних проєктів.
Інтеграція робототехніки, цифрового моделювання та змінної оснастки дозволяє центру працювати як з експериментальними сценаріями, так і з практичними задачами промисловості.